
 eng
eng


Содержание
К читателю 8
Введение 9
Глава 1. Общие сведения о радиолокации 11
1.1.
Основные понятия радиолокации и типы радиолокационных
систем 11
1.2.
Отличительные особенности функционирования
радиолокационных систем 24
1.3.
Типовая структура радиолокационной системы 27
Литература 30
Глава 2. Физические основы радиолокации 32
2.1.
Основные закономерности распространения радиоволн,
используемые в радиолокации при обнаружении целей
и измерении их координат 34
2.2.
Методы измерения координат и параметров движения целей 46
2.2.1.
Методы измерения расстояний 46
2.2.2.
Методы измерения угловых координат 53
2.2.3.
Измерение относительной скорости движения цели 65
Литература 68
Глава 3. Объекты радиолокационного наблюдения 69
3.1.
Особенности отражения радиоволн объектами
радиолокационного наблюдения 69
3.2.
Типы радиолокационных целей 72
3.3.
Эффективная поверхность отражения (рассеяния)
радиолокационных целей 76
3.4.
Радиолокационная заметность целей и пути ее снижения 81
Литература 87
Глава 4. Обнаружение объектов 88
4.1.
Основное содержание задачи обнаружения
радиолокационных целей 88
4.2.
Устройства обработки радиолокационного сигнала,
решающие задачу обнаружения наблюдаемых целей 93
4.3.
Определение основных показателей обнаружения
радиолокационных целей 101
4.4.
Характеристики обнаружения радиолокационных устройств
обнаружения 105
Литература 108
Глава 5. Разрешение объектов радиолокационного наблюдения 109
5.1.
Что такое разрешающая способность радиолокационной системы
и как она определяется 109
5.2.
Оценка показателей разрешающей способности
радиолокационной системы 116
5.2.1.
Связь разрешающей способности РЛС по шкале дальности с
параметрами зондирующего сигнала 116
5.2.2.
Связь разрешающей способности РЛС по шкале скорости
с параметрами зондирующего сигнала 123
5.2.3.
Связь разрешающей способности РЛС по угловым
координатам с параметрами ее антенной системы 126
5.3.
Реальная разрешающая способность радиолокационной системы 129
Литература 131
Глава 6. Точность измерения координат объектов наблюдения 132
6.1.
Извлечение информации о координатах и параметрах движения
наблюдаемых объектов 132
6.2.
Влияние помех на процесс оценивания параметров принимаемых
радиолокационных сигналов 134
6.3.
Взаимосвязь точности измерения координат и параметров
движения целей с характеристиками и параметрами РЛС 138
6.4.
Устройства, обеспечивающие формирование оценки параметров
радиолокационного сигнала 144
6.5.
Основные этапы решения задачи фильтрации параметров
радиолокационного сигнала 148
Литература 151
Глава 7. Радиолокационные сигналы и их формирование 152
7.1.
Описание радиолокационных сигналов 152
7.2.
Принципы формирования зондирующих сигналов 167
7.3.
Особенности конструктивного исполнения генераторов
и усилителей СВЧ-диапазона 173
7.4.
Формирование требуемой структуры зондирующих сигналов 178
Литература 183
Глава 8. Преобразование радиолокационных сигналов в радиоволну.
Радиолокационный сигнал как электромагнитная волна 184
8.1.
Физические основы преобразования радиолокационных
сигналов в электромагнитную волну 184
8.2.
Поляризационные свойства электромагнитных волн 191
8.3.
Типы антенных устройств РЛС 193
8.4.
Основные характеристики антенных устройств
радиолокационных систем 205
8.5.
Антенные системы современных и перспективных РЛС 211
Литература 214
Глава 9. Прием и обработка радиолокационных сигналов 216
9.1.
Выделение полезной информации из радиолокационного сигнала 216
9.1.1.
Радиолокационный приемник как основной элемент
выделения полезной информации 217
9.1.2.
Типы радиолокационных приемников 219
9.2.
Основное содержание процедуры обработки радиолокационного
сигнала 223
9.3.
Характеристики и параметры радиолокационных приемников 224
9.4.
Особенности некогерентной и когерентной обработки
радиолокационных сигналов 228
Литература 231
Глава 10. Цифровая обработка радиолокационных сигналов 232
10.1.
Общие сведения о цифровой обработке радиолокационных
сигналов 232
10.1.1.
Способы реализации цифровой обработки
радиолокационных сигналов 234
10.1.2.
Достоинства и недостатки цифровой обработки 237
10.2.
Особенности преобразования радиолокационного сигнала
в цифровой вид 241
10.3.
Выделение полезной информации из цифрового сигнала 244
10.4.
Что такое цифровой фильтр? 251
10.5.
Типы цифровых радиолокационных приемников 252
Литература 256
Глава 11. Обработка радиолокационных сигналов, отраженных
от подвижных объектов 257
11.1.
Особенности радиолокационного наблюдения подвижных
объектов 257
11.2.
Выделение информации о движении цели 261
11.3.
Варианты построения когерентно-импульсных РЛС,
обеспечивающих выделение сигналов движущихся целей 266
11.4.
Селекция движущихся целей с помощью устройств
череспериодной компенсации 271
11.5.
Фильтровые системы селекции движущихся целей 277
Литература 279
Глава 12. Обобщенная структура радиолокационной системы 280
12.1.
Особенности структуры построения приемо-передающих
трактов когерентных и некогерентных РЛС 280
12.2.
Система обработки радиолокационного сигнала типового
радиолокатора 291
12.3.
Представление получаемой информации о целях в современных
радиолокаторах 293
Литература 301
Глава 13. Радиолокационные системы управления воздушным движением 302
13.1.
Что такое системы управления воздушным движением? 302
13.2.
Состав радиолокационного оборудования системы управления
воздушным движением 304
13.3.
Требования, предъявляемые к радиолокационным системам
управления воздушным движением 307
13.4.
Радиолокационные системы управления воздушным
движением 312
Литература 340
Глава 14. Наземные и корабельные РЛС 341
14.1.
Типы наземных и корабельных радиолокационных систем 341
14.2.
Особенности решения задачи мониторинга воздушно-
космического пространства 343
14.3.
Наблюдение радиолокационных целей, скрытых за горизонтом 346
14.4.
Общие принципы построения и функционирования
надгоризонтных РЛС 348
Литература 372
Глава 15. Бортовые авиационные радиолокационные системы мониторинга
воздушного пространства 373
15.1.
Особенности функционирования бортовых авиационных
радиолокационных систем 373
15.2.
Перехват воздушных целей как процедура обнаружения
объектов наблюдения и измерения их координат 375
15.3.
Основные задачи и характеристики бортовых авиационных
радиолокационных систем комплексов перехвата 379
15.4.
Общие тенденции построения бортовых РЛС комплексов
перехвата и прицеливания 386
15.5.
Решение задачи обнаружения воздушных целей, наблюдаемых
на фоне мешающих отражений, бортовой РЛС авиационного
носителя 390
15.6.
Структура бортовой РЛС комплекса перехвата 410
Литература 414
Глава 16. Радиолокационные системы дистанционного зондирования
земной поверхности 416
16.1.
Типы радиолокационных систем дистанционного
зондирования земли и особенности их работы 416
16.2.
Обработка радиолокационного сигнала при формировании
радиолокационного изображения наблюдаемой поверхности
в режиме реального луча 423
16.3.
Повышение разрешающей способности РЛС обзора земли
в азимутальной плоскости на основе принципа синтезирования
апертуры антенны 426
16.4.
Обработка пространственно-временного сигнала
в радиолокационной системе с режимом синтезирования
апертуры антенны 431
16.5.
Формирование радиолокационного изображения участка
наблюдаемой поверхности в режимах синтезирования апертуры
антенны 438
16.6.
Разрешающая способность РЛС с режимом синтезирования
апертуры антенны 443
16.7.
Выделение движущихся наземных целей и структура
построения современной РЛС с режимом синтезирования
апертуры антенны 446
Литература 450
Глава 17. Метеорологические радиолокационные системы 451
17.1.
Особенности функционирования метеорологических
радиолокационных систем 451
17.2.
Характерные особенности метеорологических объектов
радиолокационного наблюдения 456
17.3.
Типы метеорологических радиолокаторов 459
Литература 464
Глава 18. Другие области применения радиолокационных систем 466
18.1.
Дистанционная диагностика состояния организма человека 467
18.2.
Области применения биорадиолокации 471
18.3.
Активные и пассивные радиолокационные системы в текущей
жизни человека 473
Литература 489
Заключение 490
Послесловие. Профессор В. С. Верба 491
Сведения об авторах 494
Список сокращений 495
Предметный указатель 497
К читателю
Коллектив авторов под руководством члена-корреспондента Российской академии наук В. С. Вербы подготовил интересную книгу, в которой доступным языком повествуется о сложной научной области радиоэлектроники — радиолокации, которая решает, если говорить кратко, задачи обнаружения различных объектов и измерения их координат с помощью радиоволн. Авторы, имея за плечами большой практический опыт преподавательской, научной и опытно-конструкторской деятельности, постарались в доступной форме донести читателю, мало знакомому с данной областью знаний, информацию о принципах и возможностях радиолокации.
Несмотря на то, что впервые о возможности использования радиоволн для обнаружения различных объектов было заявлено русским ученым Александром Степановичем Поповым еще в 1897 году, данная область науки остается молодой, так как первые практические результаты в радиолокации были достигнуты только в конце 20-х — начале 30-х годов XX столетия.
Сегодня радиолокация — незаменимый помощник человека при решении им широкого круга задач, начиная от военного дела и заканчивая медициной и сельским хозяйством.
Освоение такой интересной научной области требует от человека широкого кругозора, знаний математики и физики, базовых инженерных знаний по радиотехнике. Данная область, несомненно, притягательна для тех, кто готов решать сложные головоломки, связанные с разработкой перспективных систем радиолокации. В то же время она будет интересна и тем, кто хотел бы расширить свой кругозор в области радиоэлектронных методов и систем, а также тем, кто просто проявляет интерес к естественно-научным знаниям и не имеет специального инженерного образования.
Надо отдать должное авторам, среди которых два лауреата премии Правительства РФ в области образования 2019 года за комплекс учебно-научных изданий «Современные информационно-измерительные и управляющие радиоэлектронные системы и комплексы»: они смогли рассказать просто о сложном. С полной уверенностью можно утверждать, что книга «Радиолокация для всех» относится к жанру научно-популярной литературы и служит делу популяризации науки.
Пожелаем же данной книге широкой читательской аудитории, а авторам —дальнейшей творческой работы.
Академик Российской
академии наук
И. Б. Федоров
Введение
Данная книга посвящена сравнительно молодой и интересной отрасли науки и техники — радиолокации. Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся к концу 90-х годов XIX столетия. Однако серьезные исследования в данной области, направленные на создание практических радиолокационных устройств, начались существенно позже — в конце 20-х — начале 30-х годов XX столетия.
ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О РАДИОЛОКАЦИИ
s(t) = U (t)cos 2π f0 t , (1.1)
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора. Структурная схема такой гипотетической РЛС представлена на рис. 1.12 и относится к радиолокатору, в основу работы которого положен активный метод радиолокации при импульсном режиме излучения.

Рис. 1.12. Структурная схема гипотетической РЛС
На данной структурной схеме представлены шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, — передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Данная система является своеобразным диспетчером, который обеспечивает: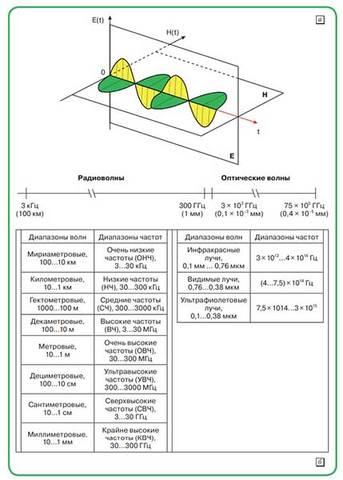
Рис. 2.1. К пояснению понятия «радиоволна»: пространственное представление электромагнитной волны (а) и сравнительная таблица диапазонов длин волн (диапазонов частот) электромагнитных колебаний (б)
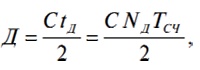
2Д = Сtд,
из которого следует, что дальность до объекта (цели) равна
Д = Сtд/2. (2.1)
φц = φл - φ0 (2.2)
l ц≥ λ (2.3)
Т0 = 1/f0,
будет больше, поскольку период Тн1 меньше, чем Т0.
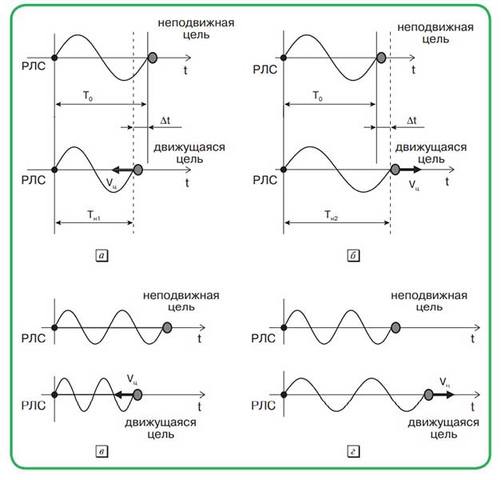
Рис. 2.16. Графическая иллюстрация изменения частоты принимаемых сигналов, отраженных от движущейся и неподвижной целей
Для сравнения на рис. 2.16в и г приведены временные диаграммы изменения частоты сигналов, отраженных от неподвижной цели и целей, двигающихся навстречу (рис. 2.16в) и от РЛС (рис. 2.16г). Как видно, сравнение характера изменения частот данных сигналов позволяет выделить приращение или уменьшение частоты принимаемого сигнала, отраженного от движущейся цели, и, следовательно, определить скорость ее движения.
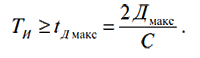
Tм≥t дмакс
где Um — амплитуда сигнала;
(ω0t + φ0) — полная фаза сигнала,
ω0 = 2πf0t — круговая частота сигнала;
φ0 — начальная фаза сигнала.
Сигнал, принимаемый РЛС, будет отличаться от излученного амплитудой и фазой. В этой связи представим принимаемый сигнал в виде
uпрм(t) = aUm cos(ω ( t - tД ) + φ0), (2.7)
где а — коэффициент, учитывающий затухание амплитуды сигнала при распространении РВ,
(ω0 ( t - tД ) + φ0) — полная фаза принимаемого сигнала;
tД — как и ранее, время запаздывания принимаемого сигнала по отношению к излученному.
Сравнивая разность фаз принимаемого и излученного сигналов, получаем
Из данного выражения, с учетом зависимости f0 = С/λ, следует, что дальность до цели равна

Таким образом, при измерении расстояний до цели в радиолокации используются три основных метода измерения дальности до объекта наблюдения — амплитудный (импульсный), частотный и фазовый.
Коллектив авторов под руководством члена-корреспондента Российской академии наук В. С. Вербы подготовил интересную книгу, в которой доступным языком повествуется о сложной научной области радиоэлектроники — радиолокации, которая решает, если говорить кратко, задачи обнаружения различных объектов и измерения их координат с помощью радиоволн. Авторы, имея за плечами большой практический опыт преподавательской, научной и опытно-конструкторской деятельности, постарались в доступной форме донести читателю, мало знакомому с данной областью знаний, информацию о принципах и возможностях радиолокации.
Несмотря на то, что впервые о возможности использования радиоволн для обнаружения различных объектов было заявлено русским ученым Александром Степановичем Поповым еще в 1897 году, данная область науки остается молодой, так как первые практические результаты в радиолокации были достигнуты только в конце 20-х — начале 30-х годов XX столетия.
Сегодня радиолокация — незаменимый помощник человека при решении им широкого круга задач, начиная от военного дела и заканчивая медициной и сельским хозяйством.
Освоение такой интересной научной области требует от человека широкого кругозора, знаний математики и физики, базовых инженерных знаний по радиотехнике. Данная область, несомненно, притягательна для тех, кто готов решать сложные головоломки, связанные с разработкой перспективных систем радиолокации. В то же время она будет интересна и тем, кто хотел бы расширить свой кругозор в области радиоэлектронных методов и систем, а также тем, кто просто проявляет интерес к естественно-научным знаниям и не имеет специального инженерного образования.
Надо отдать должное авторам, среди которых два лауреата премии Правительства РФ в области образования 2019 года за комплекс учебно-научных изданий «Современные информационно-измерительные и управляющие радиоэлектронные системы и комплексы»: они смогли рассказать просто о сложном. С полной уверенностью можно утверждать, что книга «Радиолокация для всех» относится к жанру научно-популярной литературы и служит делу популяризации науки.
Пожелаем же данной книге широкой читательской аудитории, а авторам —дальнейшей творческой работы.
Академик Российской
академии наук
И. Б. Федоров
Введение
Данная книга посвящена сравнительно молодой и интересной отрасли науки и техники — радиолокации. Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся к концу 90-х годов XIX столетия. Однако серьезные исследования в данной области, направленные на создание практических радиолокационных устройств, начались существенно позже — в конце 20-х — начале 30-х годов XX столетия.
Радиолокация с момента своего возникновения, в первую очередь, была нацелена на решение военных задач — обнаружение объектов противника (целей), измерение их координат и параметров движения для последующего своевременного уничтожения данных объектов.
Однако в современных условиях без помощи радиолокации человек не может, обходиться в своей повседневной жизни. Только помощь радиолокации, может не столь очевидна для окружающих, как помощь, например, мобильной связи или спутниковой навигации, поэтому о ней говорят, главным образом, только специалисты.
Никто из тех, кто хоть раз летал самолетом в командировку или на отдых, не задумывался, что обеспечение безопасности полета самолета в существенной степени зависит от работы наземных радиолокационных систем, которые контролируют его движение на трассе, при подходе к аэропорту, в районе аэропорта, при посадке самолета и его движении по летному полю.
Прогноз погоды и предупреждение об опасных метеорологических явлениях, например таких, как смерчи, также не обходятся, а в ряде случаев и невозможны без радиолокации. Единственным средством, которое может предупредить экипаж воздушного лайнера о встрече с таким опасным метеообъектом, как грозовое облако, является бортовой радиолокатор самолета.
Системы радиолокации являются незаменимыми помощниками человека при наблюдении им окружающей его воздушной, наземной или морской обстановок в условиях, когда отсутствует оптическая видимость, — в условиях сильной облачности, тумана, задымленности, в ночное время суток.
Спектр использования систем радиолокации в повседневной деятельности человека достаточно широк. Это и медицина, и транспорт, и сельское хозяйство, и военное дело. Сфера применения радиолокации этими областями не ограничивается. Возможности ее использования достаточно широки.
В то же время, для понимания сути такой интересной и сложной области науки и техники, как радиолокация, требуется достаточно большой объем знаний, которые закладываются еще в средней школе и затем наращиваются при обучении в высших технических учебных заведениях. Обычно дисциплины по радиолокации в технических вузах студенты начинают изучать на последних курсах, после освоения базовых дисциплин радиоинженера. Вот только некоторые из них: математический анализ, дифференциальное и интегральное исчисление, теория вероятностей и математическая статистика, курс физики, радиотехнические цепи и сигналы, статистическая радиотехника, электродинамика и распространение радиоволн. Это зачастую отпугивает молодых людей от освоения радиолокации. В этой связи авторы попытались рассказать о радиолокации простым языком, без излишнего насыщения материала математическими формулами. Для понимания материала, представленного в книге, читателю достаточно знаний по математике и физике, полученных в рамках программы средней школы. Однако при этом в книге рассмотрены как физические, так и теоретические основы радиолокации. Показаны традиционные области применения радиолокационных систем. Обращается внимание на перспективные направления применения радиолокации.
Изложение материала в книге ведется в форме беседы. Одним ее участником является специалист в области радиолокации — профессор кафедры радиолокации, другим — студент, не знакомый с радиотехникой и ее областью радиолокацией. Студент задает вопросы, а профессор на них отвечает.
Построение книги выполнено таким образом, что каждая глава может рассматриваться как самостоятельная единица. Поэтому отдельно взятую главу можно читать, не опираясь на материал, рассматриваемый в других главах книги. Каждая глава в книге завершается списком литературы, в котором указываются источники, позволяющие читателю при его желании более детально изучить материал, рассмотренный в текущей главе.
Книга ориентирована, в первую очередь, на выпускников школ и студентов первых курсов технических вузов, которые еще ищут себя в избранной профессии. В то же время она может служить подспорьем и для студентов старших курсов радиотехнических факультетов, обучающихся по специальности «Радиоэлектронные системы и комплексы». Кроме того, книга будет полезна и тем, кто проявляет интерес к получению новых знаний. Надеемся, что книга может заинтересовать и тех, кто далек как от радиолокации, так и радиотехники в целом.
Книга подготовлена коллективом авторов — членом-корреспондентом РАН, доктором технических наук, профессором В. С. Вербой (руководитель авторского коллектива и редактор материалов глав книги), докторами технических наук, профессорами А. Р. Ильчуком, Б. Г. Татарским, доктором технических наук К. Ю. Гавриловым и кандидатом технических наук А. А. Филатовым, которые имеют богатый практический опыт преподавательской деятельности в ведущих технических вузах страны и научно-исследовательской и опытно-конструкторской работы на предприятиях, занятых разработкой перспективных радиолокационных комплексов и систем.
ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О РАДИОЛОКАЦИИ
Уважаемый профессор! В средствах массовой информации часто упоминаются такие слова, как «радиолокационные системы», «радиолокационные комплексы». Не могли бы вы пояснить, что это за системы и, в первую очередь, что такое радиолокация?1.1. Основные понятия радиолокации и типы радиолокационных систем
Начну с Вашего последнего вопроса. Термин «радиолокация» происходит от двух латинских слов: ”radiare”, которое означает «излучать», и ”locatio” — «размещение, расположение». Сложение этих двух слов позволяет трактовать, что радиолокация занимается определением местоположения различных объектов по излученным от них сигналам. Это самое общее толкование слова «радиолокация». Более точной формулировкой будет следующая. Под радиолокацией понимают область радиоэлектроники, которая занимается разработкой методов и технических устройств (систем), предназначенных для обнаружения и определения координат и параметров движения различных объектов с помощью радиоволн. С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а так же с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях. Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк, несмотря на то, что радиолокация сравнительно молодое научное направление. Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся ко второй половине 90-х годов XIX столетия. В частности, годом рождения радиолокации в России считается 1897-й, когда изобретатель радио Александр Степанович Попов, проводя свои эксперименты в открытом море по установлению связи с помощью беспроводного теле- графа, обнаружил эффект отражения радиоволн. Было это так.
Летом 1897 года под руководством А. С. Попова в Финском заливе проводились испытания радиоаппаратуры, изобретенного им беспроволочного телеграфа. В испытаниях принимали участие два морских судна — транспорт «Европа» и крейсер «Азия». На данных судах были установлены приемная и передающая аппаратура, и между ними поддерживалась непрерывная радиосвязь. Неожиданно между кораблями прошел линейный крейсер «Лейтенант Ильин». Связь между кораблями прервалась. Через некоторое время, когда «Лейтенант Ильин» прошел линию, соединяющую корабли, связь возобновилась. Это «затенение» было замечено испытателями, и в отчете А. С. Попова по результатам экспериментов было отмечено, что появление каких-либо препятствий между передающей и приемной позициями может быть обнаружено как ночью, так и в тумане. Так родилась радиолокация.
Таким образом, радиолокация — это область радиотехники, которая занимается разработкой методов и систем, предназначенных для обнаружения различных объектов и измерения их координат и параметров движения с помощью радиоволн.
Для того чтобы были понятны последующие мои объяснения, рассмотрим основные термины и определения, которые используются в радиолокации.
Процесс просмотра заданной области пространства в целях получения информации о наличии в ней различных объектов и определения их параметров с помощью радиоволн называют радиолокационным наблюдением. Объекты же радиолокационного наблюдения называют радиолокационными целями или просто целями. Примерами радиолокационных целей могут служить: корабли, самолеты, танки, автомашины, люди, птицы и т. д.
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств — радиолокационного обнаружителя или радиолокационного измерителя дальности (радиолокационного даль- номера) соответственно. Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС) или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англо-язычной литературе — радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал, который может быть сформирован либо путем отражения (вторичного излучения) электромагнитных колебаний (ЭМК) от цели, либо переизлучения (ретрансляции) данных колебаний целью, либо излучения колебаний самой целью. Электромагнитные колебания, которые используют для облучения цели или заданной области пространства, обычно называют зондирующими колебаниями или зондирующим сигналом.
Операции, выполняемые в ходе радиолокационного наблюдения над принимаемыми радиолокационными сигналами для извлечения информации о целях, называют обработкой радиолокационных сигналов. Обработка является составной частью процесса радиолокационного приема, который, помимо вышеназванной процедуры, включает так же процедуры преобразования радиолокационного сигнала, не связанные с извлечением информации о цели.
В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС или методы радиолокации.
- Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели (рис. 1.1). Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
- Активные РЛС с активным ответом, или активный метод радиолокации с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых ЭМК целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором (рис. 1.2). Данный метод широко используется в системах определения государственной принадлежности наблюдаемых объектов, управления воздушным движением (УВД), а так же в радионавигационных системах, например в радиотехнических системах ближней навигации при определении дальности до радиомаяка (устройство, излучающее радиосигналы, местоположение которого известно наблюдателю).
- Полуактивный метод радиолокации, или полуактивные РЛС. При использовании данного метода радиолокационный сигнал формируется, как при активном методе путем отражения зондирующих ЭМК от цели. Но передающее устройство, формирующее зондирующие ЭМК (передатчик (ПРД) РЛС), и устройство, принимающее отраженные сигналы (приемник (ПРМ) РЛС), разнесены в пространстве (рис. 1.3). Данный метод, например, широко используется при наведении управляемых ракет класса «воздух — воздух» на поражаемые воздушные цели, а так же в многопозиционных РЛС, под которыми обычно понимают совокупность разнесенных в пространстве нескольких устройств формирования зондирующих сигналов (передатчиков) и устройств приема отраженных сигналов (приемников).
- Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства (приемника (ПРМ)), состоящего из приемной антенны и собственно приемника (рис. 1.4).
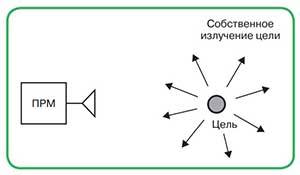
Рис. 1.4. Графическая иллюстрация принципа пассивной радиолокации
Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными. Данные РЛС широко применяются при пеленгации радиоизлучающих систем противника, например РЛС, входящих в систему управления ПВО противоборствующей стороны.

Рис. 1.1. Графическая иллюстрация принципа активной радиолокации

Рис. 1.2. Графическая иллюстрация принципа активной радиолокации с активным ответом

Рис. 1.3. Графическая иллюстрация принципа полуактивной радиолокации

Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными.В ходе радиолокационного приема поступивших на вход ПРМ РЛС электромагнитных колебаний от цели, как правило, необходимо решить следующие задачи:
- обнаружить цель, т. е. установить факт наличия полезного сигнала s(t), отраженного от цели, в принимаемом колебании у(t). Прием данного колебания у(t), как правило, сопровождается различного рода помехами n(t), природа происхождения которых может быть самой разнообразной (внутренний шум приемника РЛС, отражения от облака пассивных отражателей, искусственно организованные помехи и т. п.). Помехи относятся к категории так называемых случайных сигналов, предсказать изменение которых во времени заранее невозможно. В этой связи при действии помех заранее неизвестно, есть ли полезный сигнал, например отраженный от цели, в принятом приемником РЛС колебании. При отсутствии помех любой сигнал, который появляется на входе приемника РЛС, будет восприниматься как полезный. В этой связи при решении задачи обнаружения, как, впрочем, и всех перечисленных выше, используется специальный математический аппарат, основанный на теории вероятностей и математической статистике;
- разрешить радиолокационные цели, т. е. раздельно обнаружить несколько одновременно существующих в принимаемом колебании у(t) отраженных от целей сигналов с близкими, но различающимися параметрами, или измерить значения параметров данных сигналов. Разрешение имеет смысл при наличии нескольких целей в зоне наблюдения РЛС;
- измерить значения параметров α полезного сигнала s(t, α) в целях получения информации о координатах и параметрах движения целей. Такими параметрами чаще всего являются время запаздывания tд, доплеровское смещение частоты f дп и направление прихода γ принимаемой электромагнитной волны (ЭМВ), по которому оцениваются угловые координаты наблюдаемой цели.
Дополнительными задачами радиолокационного наблюдения являются различение и распознавание целей. Если решение первой задачи позволяет определить один из классов целей (воздушные, морские или наземные цели), то решение второй позволяет определить тип цели в заданном классе (самолет, вертолет и т. д.). Решение данных задач основывается на анализе всего объема информации, который содержится в радиолокационном сигнале. Эффективное решение указанных задач возможно при использовании всех характеристик, описывающих принимаемые радиолокационные сигналы, — временных, пространственных и поляризационных.
Все существующие РЛС можно разделить на следующие основные группы. В первую группу входят РЛС класса «воздух — воздух», основной задачей которых является обнаружение, измерение координат и параметров движения воздушных целей. К данным РЛС относятся, например, радиолокационные станции перехвата и прицеливания, устанавливаемые на самолетах-истребителях (фото 1.1),

Фото 1.1. РЛС перехвата и прицеливания самолета-истребителя
либо авиационные РЛС дальнего радиолокационного обнаружения воздушных целей (фото 1.2).

Фото 1.2. Авиационный комплекс радиолокационного дозора и наведения

Фото 1.1. РЛС перехвата и прицеливания самолета-истребителя
либо авиационные РЛС дальнего радиолокационного обнаружения воздушных целей (фото 1.2).

Фото 1.2. Авиационный комплекс радиолокационного дозора и наведения
Вторую группу составляют РЛС класса «воздух — поверхность». Данные РЛС служат для получения радиолокационного изображения (РЛИ) земной поверхности либо информации о координатах и параметрах движения наземных целей. К данным системам относятся, например, РЛС обзора Земли (фото 1.3),

Фото 1.3. РЛС обзора Земли которые обеспечивают получение радиолокационного изображения поверхности Земли и информации о координатах и параметрах движения наземных целей, либо РЛС обеспечения безопасности полетов на малых и предельно малых высотах, которые позволяют получать информацию о структуре рельефа подстилающей поверхности Земли. В эту группу входят также и РЛС, обеспечивающие радиолокационную разведку наземных объектов и наблюдение малоразмерных наземных целей.

Фото 1.3. РЛС обзора Земли которые обеспечивают получение радиолокационного изображения поверхности Земли и информации о координатах и параметрах движения наземных целей, либо РЛС обеспечения безопасности полетов на малых и предельно малых высотах, которые позволяют получать информацию о структуре рельефа подстилающей поверхности Земли. В эту группу входят также и РЛС, обеспечивающие радиолокационную разведку наземных объектов и наблюдение малоразмерных наземных целей.
В третью группу входят РЛС класса «поверхность — воздух», основной задачей которых, как и радиолокаторов первой группы, является обнаружение, измерение координат и параметров движения воздушных целей. Однако местом установки таких систем являются либо поверхность Земли, либо объекты наземной и морской техники (подвижные или стационарные). Типичным представителем таких систем являются РЛС обнаружения, входящие в системы управления воз- душным движением (УВД) (фото 1.4) или противовоздушной обороны (ПВО) страны, а так же РЛС, призванные для наблюдения за метеорологической обстановкой (фото 1.5).

Фото 1.4. «Лира Т» — обзорный трассовый радиолокатор
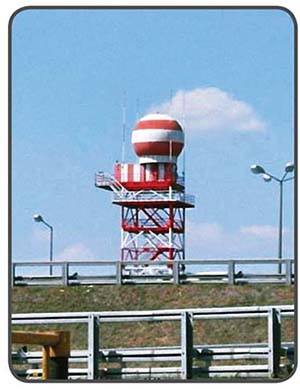
Фото 1.5. Метеорологический радиолокатор (метеорадиолокатор) МРЛ -5Б

Фото 1.4. «Лира Т» — обзорный трассовый радиолокатор

Фото 1.5. Метеорологический радиолокатор (метеорадиолокатор) МРЛ -5Б
Четвертую группу составляют РЛС класса «поверхность — поверхность», основной задачей которых является обнаружение, измерение координат и параметров движения наземных целей либо воздушных объектов при перемещении последних по поверхности Земли. Типичным представителем таких систем являются, например, РЛС обзора летного поля (фото 1.6), которые входят в системы управления движением самолетов при рулении их по летному полю (взлетно-посадочным полосам (ВПП) и рулежным дорожкам).

Фото 1.6. Радиолокатор обзора летного поля «Атлантика Э3»

Фото 1.6. Радиолокатор обзора летного поля «Атлантика Э3»
Из приведенных примеров РЛС заявленных классов следует, что на первом месте в названии класса стоит слово, обозначающее место установки радиолокатора, а на втором — слово, определяющее объект, по которому работает РЛС. В частности, например, если речь идет о классе РЛС «поверхность — воздух», то это значит, что РЛС находится на земной поверхности, а объектами ее наблюдения являются воздушные цели.
Кроме отмеченных, существует еще одна группа РЛС, которые строятся по многофункциональному принципу и объединяют в себе решение задач, например, возлагаемых как на радиолокационные системы класса «воздух — воздух», так и на системы класса «воздух — поверхность». Другими словами, данные РЛС объединяют в себе функции радиолокаторов различных классов. Такими, например, являются бортовые РЛС, устанавливаемые на современные самолеты- истребители (тактические истребители) (фото 1.7).
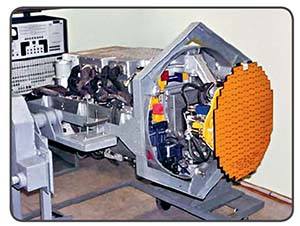
Фото 1.7. Многофункциональная РЛС «Копье-21»

Фото 1.7. Многофункциональная РЛС «Копье-21»
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека, либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т. п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
В ряде случаев в состав бортовых систем технического средства (носителя) входят несколько РЛС, которые решают одну общую задачу. В этом случае совокупность РЛС образует радиолокационный комплекс. Иногда под радиолокационным комплексом понимают совокупность из РЛС и других технических систем или устройств, которые обеспечивают решение задачи, возлагаемой на РЛС. В частности, такой совокупностью может быть РЛС и вычислительная система, обеспечивающая процесс обработки радиолокационного сигнала.
Таким образом, радиолокационные системы делятся на пять больших классов: РЛС класса «воздух — воздух», РЛС класса «воздух — поверхность», РЛС класса «поверхность — воздух», РЛС класса «поверхность — поверхность» и многофункциональные РЛС.
По месту установки РЛС и ее составных частей различают однопозиционные и многопозиционные РЛС. Под однопозиционными понимают РЛС, передатчик и приемник которых располагаются в одной точке пространства. Если данное условие не выполняется, то РЛС относят к разряду многопозиционных . При построении РЛС по многопозиционному принципу количество передающих и приемных позиций может быть разным (рис. 1.5). Однако если принцип действия многопозиционной РЛС основан на активном методе радиолокации, то в составе данной системы должна быть как минимум одна передающая позиция (рис. 1.6). Если в основу работы многопозиционной РЛС положен пассивный метод радиолокации, то в этом случае все ее элементы представляются в виде приемных позиций, разнесенных в пространстве (рис. 1.7). Позиции, в которых располагаются элементы многопозиционной РЛС, могут быть неподвижными (стационарными) и подвижными, т. е. располагаться на подвижных носителях или, как пишут в англоязычной литературе, на платформах.
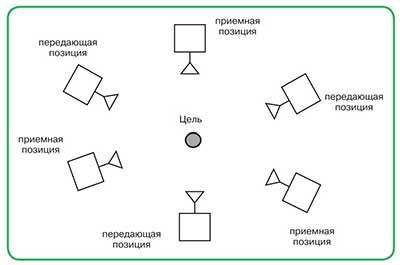
Рис. 1.5. Многопозиционная радиолокационная система, состоящая из совокупности передающих и приемных позиций
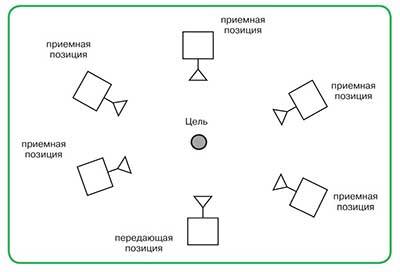
Рис. 1.6. Многопозиционная радиолокационная система, состоящая из совокупности приемных и одной передающей позиций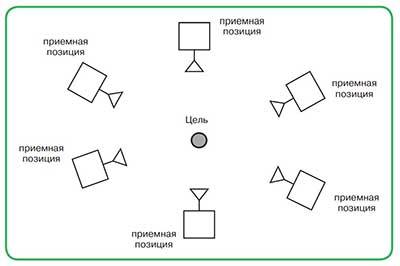
Рис. 1.7. Многопозиционная радиолокационная система, состоящая из совокупности приемных позиций
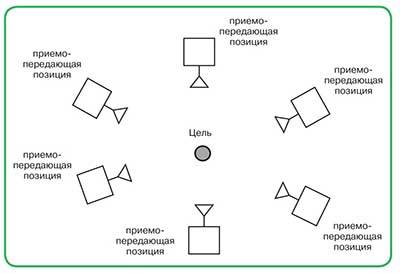
Рис. 1.8. Многопозиционная радиолокационная система, состоящая из совокупности приемо-передающих позиций
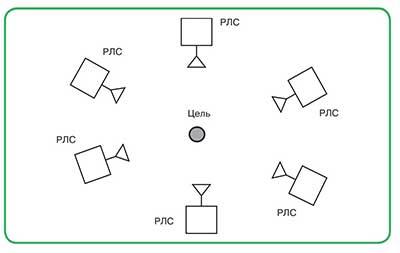
Рис. 1.9. Многопозиционная радиолокационная система, состоящая из совокупности радиолокационных станций

Рис. 1.5. Многопозиционная радиолокационная система, состоящая из совокупности передающих и приемных позиций

Рис. 1.6. Многопозиционная радиолокационная система, состоящая из совокупности приемных и одной передающей позиций

Рис. 1.7. Многопозиционная радиолокационная система, состоящая из совокупности приемных позиций

Рис. 1.8. Многопозиционная радиолокационная система, состоящая из совокупности приемо-передающих позиций

Рис. 1.9. Многопозиционная радиолокационная система, состоящая из совокупности радиолокационных станций
В случае, когда в состав многопозиционной РЛС входят только два элемента (позиции), ее называют двухпозиционной. Если при этом позиции, в которых расположены элементы РЛС, являются стационарными, то такую двухпозиционную РЛС часто называют бистатической.
Многопозиционная РЛС может быть образована и из совокупности приемо-передающих элементов, располагаемых в каждой из разнесенных позиций (рис. 1.8), либо из совокупности разнесенных в пространстве отдельных РЛС(рис. 1.9).
Таким образом, радиолокационные системы различных классов могут быть построены как на однопозиционных, так и многопозиционных принципах.
Спасибо, уважаемый профессор! Теперь я понял, что такое РЛС и какие задачи она решает. Однако хотелось бы понять, существуют ли различия в работе РЛС, относящихся к одному классу?1.2. Отличительные особенности функционирования радиолокационных систем
Если говорить коротко, ответ положительный — да, существуют. Но для того, чтобы понять, в чем это различие, необходимо рас- смотреть, что собой представляет радиолокационный сигнал.
Первоначально рассмотрим зондирующий сигнал. В самом простейшем виде его можно представить, как
s(t) = U (t)cos 2π f0 t , (1.1)
где U(t) — огибающая сигнала или, другими словами, функция, которая описывает изменение во времени амплитуды сигнала; 2πf0t — фаза зондирующего сигнала; f0 — несущая частота сигнала; t — текущее время.
В зависимости от того, как изменяется зондирующий сигнал во времени, он может быть непрерывным или импульсным.
При импульсной форме зондирующего сигнала он представляется в виде чередующихся во времени отрезков колебаний вида (1.1), которые называют импульсами, разделенных пустыми отрезками (рис. 1.10).
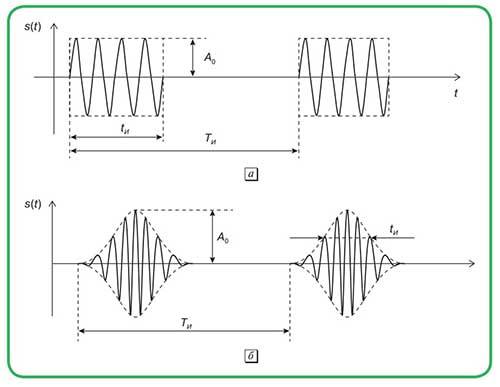
Рис. 1.10. Последовательности радиоимпульсов с прямоугольной (а) и колоколообразной (б) огибающими
Форма импульсов может быть различной. В частности, на рис. 1.10а представлен зондирующий сигнал в виде последовательности из прямоугольных радиоимпульсов, а на рис. 1.10б — в виде последовательности радиоимпульсов с колоколообразной огибающей. Расстояние по оси времени между началом одного импульса до начала после- дующего называют периодом следования импульсов и обозначают как ТИ. Протяженность же по оси времени отдельного импульса называют длительностью импульса и обозначают как tИ. Отношение периода следования импульсов ТИ к их длительности tИ называют скважностью импульсов, которая показывает, сколько целых импульсов заданной длительности укладывается во временной интервал, равный их периоду следования. Кроме этого, каждый импульс, так же как и сигнал вида (1.1), описывается такими параметрами, как огибающая, фаза и несущая частота. Причем, как правило, такие параметры, как огибающая и несущая частота, являются одинаковыми для каждого импульса зондирующего сигнала. На рис. 1.11 представлены огибающие отдельных импульсов, образующих зондирующий сигнал, в виде прямоугольной последовательности радиоимпульсов (рис. 1.11а) и последовательности радиоимпульсов с колоколообразной огибающей (рис. 1.11б ).
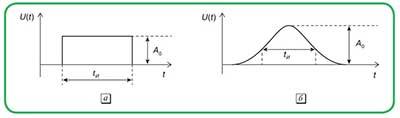
Рис. 1.11. Огибающие радиоимпульсов: прямоугольной (а) и колоколообразной (б) форм
Кроме того, на рисунках показаны пиковые (максимальные) значения А0 амплитуд отдельных импульсов, входящих в последовательность зондирующих сигналов.

Рис. 1.10. Последовательности радиоимпульсов с прямоугольной (а) и колоколообразной (б) огибающими
Форма импульсов может быть различной. В частности, на рис. 1.10а представлен зондирующий сигнал в виде последовательности из прямоугольных радиоимпульсов, а на рис. 1.10б — в виде последовательности радиоимпульсов с колоколообразной огибающей. Расстояние по оси времени между началом одного импульса до начала после- дующего называют периодом следования импульсов и обозначают как ТИ. Протяженность же по оси времени отдельного импульса называют длительностью импульса и обозначают как tИ. Отношение периода следования импульсов ТИ к их длительности tИ называют скважностью импульсов, которая показывает, сколько целых импульсов заданной длительности укладывается во временной интервал, равный их периоду следования. Кроме этого, каждый импульс, так же как и сигнал вида (1.1), описывается такими параметрами, как огибающая, фаза и несущая частота. Причем, как правило, такие параметры, как огибающая и несущая частота, являются одинаковыми для каждого импульса зондирующего сигнала. На рис. 1.11 представлены огибающие отдельных импульсов, образующих зондирующий сигнал, в виде прямоугольной последовательности радиоимпульсов (рис. 1.11а) и последовательности радиоимпульсов с колоколообразной огибающей (рис. 1.11б ).

Рис. 1.11. Огибающие радиоимпульсов: прямоугольной (а) и колоколообразной (б) форм
Кроме того, на рисунках показаны пиковые (максимальные) значения А0 амплитуд отдельных импульсов, входящих в последовательность зондирующих сигналов.
При непрерывной форме зондирующего сигнала он представляет собой колебание, которое по оси времени меняется непрерывно. Процесс изменения его во времени ограничивается только временем работы передатчика РЛС. Данный сигнал можно описать выражением (1.1), полагая, что временной интервал изменения данного сигнала стремится к бесконечности.
В свою очередь, РЛС, которая использует импульсные зондирующие сигналы, называется импульсной РЛС или РЛС, работающей в импульсном режиме излучения. РЛС, использующая непрерывные зондирующие сигналы, называется непрерывной РЛС или РЛС, работающей в непрерывном режиме излучения. На практике наибольшее распространение получили РЛС, работающие в импульсном режиме излучения.
Сигнал, который поступает на вход РЛС (радиолокационный сигнал), отличается от излученного (зондирующего), в первую очередь, своей амплитудой и временем его появления относительно момента излучения сигнала s(t). Разность данных времен обычно называют временем запаздывания радиолокационного сигнала и обозначают как tд. Учитывая данные замечания, сигнал, действующий на входе приемника РЛС, можно записать как
s(t) = βU(t -tд)cos 2π
f0 (t-tд), (1.2)
f0 (t-tд), (1.2)
где β — коэффициент, учитывающий уменьшение амплитуды принимаемого сигнала по сравнению с излученным за время распространения радиоволн от РЛС к цели и обратно.
Как видно из (1.2), информацию о цели несет в себе как огибающая сигнала, так и его фаза. В зависимости от того, используется или нет при обработке принимаемого сигнала информация об изменении его фазы, все современные РЛС делятся на две большие группы — когерентные и некогерентные. В когерентных РЛС при обработке радиолокационного сигнала используется информация, содержащаяся как в фазе сигнала, так и в его огибающей. В РЛС, которые относятся к некогерентному типу, обработка радиолокационного сигнала ведется без учета изменения его фазы. В этой связи в рамках одного класса РЛС могут быть построены как по когерентному, так и некогерентному принципам. В частности, при использовании импульсных РЛС на практике находят применение радиолокаторы, работающие с некогерентными и когерентными последовательностями радиоимпульсов и решающие одинаковые задачи.
Необходимо заметить, что когерентные РЛС по отношению к некогерентным обладают большими информационными возможностями, поскольку используют всю информацию о цели, заключенную в радиолокационном сигнале. Однако к данным РЛС предъявляют более жесткие требования по стабильности работы ее приемо-передающих элементов, чем это имеет место при построении РЛС некогерентного типа.
Из вышесказанного следует, что радиолокационные системы одного класса могут быть как когерентными, так и некогерентными. Когерентные РЛС обладают перед некогерентными преимуществами по объему извлекаемой информации из принимаемого сигнала от цели, однако уступают некогерентным РЛС по сложности построения.
Уважаемый профессор! Из Вашего объяснения следует, что существуют различные типы радиолокационных систем. В то же время хотелось понять, какие типовые элементы должны присутствовать в РЛС любого типа и какие функции на них возлагаются?1.3. Типовая структура радиолокационной системы
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора. Структурная схема такой гипотетической РЛС представлена на рис. 1.12 и относится к радиолокатору, в основу работы которого положен активный метод радиолокации при импульсном режиме излучения.

Рис. 1.12. Структурная схема гипотетической РЛС
На данной структурной схеме представлены шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, — передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик или передающий тракт РЛС обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему (антенну).
Антенна в импульсном радиолокаторе работает как на передачу (режим излучения зондирующего сигнала), так и на прием (режим приема сигнала, отраженного от цели).
В режиме передачи антенна обеспечивает преобразование зондирующего радиосигнала, поступившего от ПРД, в радиоволну и излучение зондирующего колебания в направлении на цель.
В режиме приема антенна обеспечивает преобразование отраженной от цели радиоволны в радиосигнал с последующей передачей его в приемник. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию (выделение) полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
На рис. 1.12 операции, выполняемые системой обработки для решения конкретной задачи радиолокационного приема, условно объединены в канал, чтобы подчеркнуть тот факт, что данную операцию можно выполнить отдельным конструктивно исполненным устройством. Как видно из схемы на рис. 1.12, в составе системы обработки имеются шесть каналов — обнаружения, измерения дальности, измерения скорости, измерения угловых координат, распознавания и формирования радиолокационного изображения (РЛИ).
В цифровой системе обработки каждый канал реализуется с помощью специально разработанной совокупности алгоритмов, конкретное содержание которых отражает специфику радиолокатора. Вся совокупность алгоритмов, закладываемая в цифровую систему обработки, называется программным обеспечением.
Каждый из представленных на схеме рис. 1.12 каналов системы обработки обеспечивает решение задач, соответствующих своему наименованию. Так, канал обнаружения обеспечивает установление факта наличия цели (целей) в зоне ответственности РЛС. Каналы измерения дальности, скорости и угловых координат обеспечивают определение дальности Д, скорости V и угловых координат φ г, φв обнаруженных целей в горизонтальной (в плоскости азимута) и вертикальной (в плоскости угла места) плоскостях соответственно. Канал распознавания служит для выявления классов и типов наблюдаемых объектов. Канал формирования радиолокационного изображения служит для получения РЛИ земной поверхности, которое представляет собой двумерную плоскую картину, чаще всего в координатах «дальность — азимут», распределения интенсивности отраженного сигнала от объектов на поверхности Земли и самой земной поверхности в пределах участка поверхности Земли, облучаемой РЛС.
Каждая их рассмотренных групп алгоритмов (каналов) функционирует в тесной взаимосвязи друг с другом. В частности, установление факта наличия в зоне ответственности РЛС цели важно, но бессмысленно без определения ее местоположения в пространстве. А данную информацию можно получить только в том случае, если будут известны такие параметры цели, как дальность до нее и ее угловые координаты. В то же время необходимо отметить, что количество каналов зависит от предназначения РЛС. Ряд из них может отсутствовать, например, каналы распознавания и формирования РЛИ, если на РЛС данные задачи не возлагаются.
Конечно же, в реально существующей РЛС количество выполняемых операций и соответствующее им число каналов больше, чем рассмотрено в схеме на рис. 1.12. Однако мы сейчас говорим об общих принципах построения РЛС и не ставим перед собой задачу подробно рассказать обо всех особенностях, связанных с функционированием радиолокатора.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку. Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам. Управление рассмотренными элементами РЛС осуществляется системой управления и синхронизации.
Данная система является своеобразным диспетчером, который обеспечивает:
- своевременное переключение каналов передачи и приема сигналов для формирования зондирующих колебаний в направлении на цель и обеспечения приема отраженных от нее сигналов;
- синхронную работу (синхронизацию) во времени всех элементов РЛС путем формирования специальных синхронизирующих сигналов и выделения необходимых временных интервалов на выполнение той или иной процедуры в ходе формирования зондирующих сигналов и обработки отраженных сигналов от цели;
- формирование специальных сигналов и опорных колебаний для обеспечения работы передающих и приемных каналов РЛС;
- управление системой обработки в целях своевременного включения в работу каналов (алгоритмов), обеспечивающих решение задач обнаружения и измерения координат и параметров движения целей, распознавания целей, а так же формирования РЛИ;
- управление параметрами режимов излучения и приема РЛС в целях создания условий для обеспечения высокого качества решения текущей задачи радиолокационного наблюдения.
Таким образом, подводя итог обсуждению, можно сказать, что современный радиолокатор является сложным техническим устройством, при реализации которого используются все современные технологии, которые касаются как конструктивного исполнения элементов радиолокатора, так и его программного обеспечения. Программное обеспечение, закладываемое в систему обработки, определяет искусственный интеллект РЛС, и определяет возможности радиолокатора и качество решения возлагаемых на него задач.Литература
- Бакулев П. А. Радиолокационные системы: Учебник для вузов. — М.: Радиотехника, 2015.
- Дудник П. И., Герасимов А. А., Ильчук А. Р., Кондратенков Г. С., Татарский Б. Г. Авиационные радиолокационные комплексы и системы / Под ред. П. И. Дудника. — М.: Изд. ВВИА им. проф. Н. Е. Жуковского, 2006.
- Радиоэлектронные системы: Основы построения и теория. Справочник. Изд. 2-е, перераб. и доп. / Под ред. Я. Д. Ширмана. — М.: Радиотехника, 2007.
- Радиотехнические системы: Учеб. для вузов по спец. «Радиотехника» / Ю. П. Гришин, В. П. Ипатов, Ю. М. Казаринов и др.; под ред. Ю. М. Казаринова. — М.: Высшая школа, 1990.
- Радиолокационные системы / Под ред. А. И. Николаева. — М.: Издательство МГТУ имени Н. Э. Баумана, 2016.
- Верба В. С. Обнаружение наземных объектов. Радиолокационные системы обнаружения и наведения воздушного базирования. — М.: Радиотехника, 2007.
Уважаемый профессор, не могли бы Вы рассказать, на каких физических основах базируется радиолокация?
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн. Традиционно все объекты наблюдения в радиолокации называются целями, поскольку первоначально радиолокация рассматривалась как прикладная наука, способствующая автоматизации и эффективности решения только военных задач по обнаружению и измерению координат объектов противника.

Рис. 2.1. К пояснению понятия «радиоволна»: пространственное представление электромагнитной волны (а) и сравнительная таблица диапазонов длин волн (диапазонов частот) электромагнитных колебаний (б)
Использование радиоволн (РВ) или, другими словами, электромагнитных колебаний (ЭМК) (рис. 2.1а), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц (рис. 2.1б), определяет основные преимущества радиолокационных систем (РЛС) и устройств (РЛУ) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения РВ в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС и РЛУ.
Закономерности распространения РВ в однородной среде достаточно стабильны в любое время суток и в любое время года.
Уважаемый профессор, а не могли бы Вы рассказать, каковы основные закономерности распространения радиоволн, позволяющие проводить радиолокационные измерения и обнаруживать цели?2.1. Основные закономерности распространения радиоволн, используемые в радиолокации при обнаружении целей и измерении их координат Основными закономерностями распространения РВ, которые позволяют обнаруживать объекты в зоне радиолокационной ответственности (в области пространства, которая определена для просмотра радиолокационной системе или устройству) и измерять координаты и параметры их движения, являются следующие:
- постоянство скорости и прямолинейность распространения радиоволн в однородной среде. При проведении инженерных расчетов скорость С распространения радиоволн принимают равной 3 *10−8 м/с;
- способность РВ отражаться от различных областей пространства, электрические или магнитные параметры которых (электрическая проводимость или магнитная проницаемость) отличаются от аналогичных параметров среды распространения;
- изменение частоты fпрм принимаемого сигнала по отношениюк частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера (1803–1853 гг.), который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо (1819–1896 гг.), а в 1900 году — экспериментально проверен русским ученым Аристархом Белопольским (1854–1934 гг.) на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием ≪эффект Доплера — Белопольского≫.
Первое из указанных свойств РВ лежит в основе измерения расстояний (дальности) до объекта (цели) и определения его угловых координат.
Второе свойство позволяет обнаруживать объекты, которые находятся в зоне видимости (зоне радиолокационной ответственности) РЛС.
Третье свойство позволяет измерять радиальную скорость движения цели. Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал (рис. 2.2).
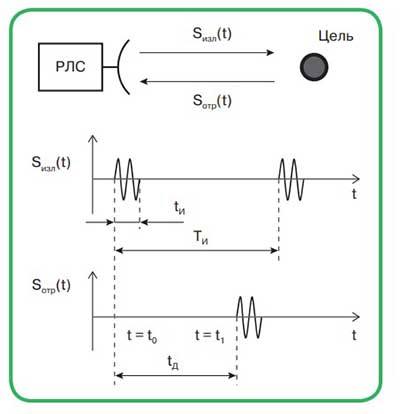
Рис. 2.2. Измерение дальности до цели с помощью радиоволн
Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость С распространения радиосигнала (радиоволны) в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения t0 зондирующего сигнала и момент приема t1 отраженного сигнала от цели.

Рис. 2.2. Измерение дальности до цели с помощью радиоволн
Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость С распространения радиосигнала (радиоволны) в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения t0 зондирующего сигнала и момент приема t1 отраженного сигнала от цели.
В результате разность (t1 − t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, который равен 2Д, где Д —дальность до объекта (расстояние между РЛС и целью). Разность времен
(t1 − t0)
в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство
(t1 − t0)
в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство
2Д = Сtд,
из которого следует, что дальность до объекта (цели) равна
Д = Сtд/2. (2.1)
Процесс измерения дальности до объекта наблюдения с помощью РЛС можно сравнить с процессом измерения длины какого-либо предмета с помощью обыкновенной линейки (рис. 2.3).

Рис. 2.3. Объяснение процесса измерения длины объекта
Начало шкалы линейки в этом случае должно соответствовать точке расположения РЛС, а значение шкалы линейки, которое совпадет с точкой расположения цели, будет соответствовать расстоянию (дальности) до объекта наблюдения. Точность измерения дальности будет определяться ценой деления Δl шкалы линейки. Чем меньше величина δl, тем выше точность измерения дальности. Аналогом цены деления δl шкалы линейки служит показатель РЛС, именуемый разрешающей способностью ее по дальности и обозначаемый как δД. Данный показатель характеризует минимальное расстояние между двумя близко расположенными объектами, при котором сигналы, отраженные от данных объектов и воспринимаемые приемником РЛС, будут на его выходе наблюдаться раздельно (рис. 2.4).
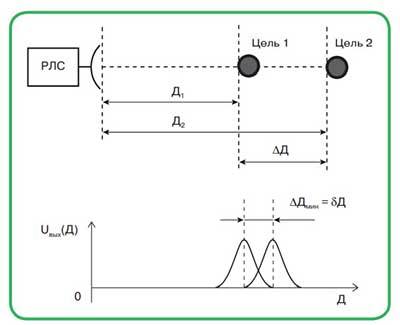
Рис. 2.4. К пояснению понятия «разрешающая способность РЛС по дальности»
Если все расстояние ≪РЛС — цель≫ разбить на элементы δД, то получим некоторый аналог линейки с ценой шкалы, равной величине δД (рис. 2.5).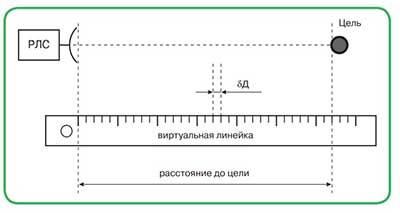 Рис. 2.5. Представление процесса измерения расстояния до цели с помощью виртуальной линейки
Особенностью такой линейки будет ее виртуальность и длина, которая должна быть не меньше, чем дальность действия РЛС. В зависимости от предназначения РЛС дальность ее действия, а следовательно, и длина виртуальной линейки, может составлять от единиц километров до нескольких сотен километров.
Рис. 2.5. Представление процесса измерения расстояния до цели с помощью виртуальной линейки
Особенностью такой линейки будет ее виртуальность и длина, которая должна быть не меньше, чем дальность действия РЛС. В зависимости от предназначения РЛС дальность ее действия, а следовательно, и длина виртуальной линейки, может составлять от единиц километров до нескольких сотен километров.

Рис. 2.3. Объяснение процесса измерения длины объекта
Начало шкалы линейки в этом случае должно соответствовать точке расположения РЛС, а значение шкалы линейки, которое совпадет с точкой расположения цели, будет соответствовать расстоянию (дальности) до объекта наблюдения. Точность измерения дальности будет определяться ценой деления Δl шкалы линейки. Чем меньше величина δl, тем выше точность измерения дальности. Аналогом цены деления δl шкалы линейки служит показатель РЛС, именуемый разрешающей способностью ее по дальности и обозначаемый как δД. Данный показатель характеризует минимальное расстояние между двумя близко расположенными объектами, при котором сигналы, отраженные от данных объектов и воспринимаемые приемником РЛС, будут на его выходе наблюдаться раздельно (рис. 2.4).

Рис. 2.4. К пояснению понятия «разрешающая способность РЛС по дальности»
Если все расстояние ≪РЛС — цель≫ разбить на элементы δД, то получим некоторый аналог линейки с ценой шкалы, равной величине δД (рис. 2.5).
 Рис. 2.5. Представление процесса измерения расстояния до цели с помощью виртуальной линейки
Особенностью такой линейки будет ее виртуальность и длина, которая должна быть не меньше, чем дальность действия РЛС. В зависимости от предназначения РЛС дальность ее действия, а следовательно, и длина виртуальной линейки, может составлять от единиц километров до нескольких сотен километров.
Рис. 2.5. Представление процесса измерения расстояния до цели с помощью виртуальной линейки
Особенностью такой линейки будет ее виртуальность и длина, которая должна быть не меньше, чем дальность действия РЛС. В зависимости от предназначения РЛС дальность ее действия, а следовательно, и длина виртуальной линейки, может составлять от единиц километров до нескольких сотен километров.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tД, которое при известной скорости С распространения радиоволн позволяет определить дальность до нее в соответствии с выражением (2.1).
При определении углового положения цели РЛС выполняет роль транспортира (рис. 2.6), который, как известно, служит для измерения величин углов между выбранным направлением отсчета и направлением на объект, представляющий интерес.

Рис. 2.6. Представление процесса измерения угловой координаты объекта с помощью виртуального транспортира
Направление, которое выбирается за отсчетное при использовании РЛС, может представлятьсобой, например, направление ≪север — юг≫ (северное направление), направление, соответствующее продольной оси летательного аппарата или транспортного средства и т. п. Все зависит от предназначения РЛС и места ее установки — наземная или бортовая (самолетная, корабельная, космическая и т. п.). Для определенности в дальнейшем в качестве отсчетного будем принимать северное направление. В этом случае угловое положение цели будет соответствовать углу между направлением на север и направлением на цель (рис. 2.7).
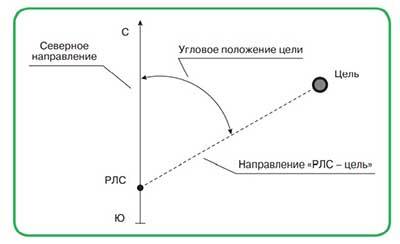
Рис. 2.7. Графическая иллюстрация процесса измерения угловой координаты наблюдаемой цели
Для того, чтобы определить направление на цель, необходимо определить направление нормали (перпендикуляра) к фазовому фронту радиоволны, отраженной от цели или излученной ею. При этом под фазовым фронтом РВ понимают геометрическое место точек, расположенных вокруг цели, которые соответствуют постоянному значению фазы РВ при условии, что радиоволна отражается от цели во всех направлениях в пределах 360 градусов (рис. 2.8).
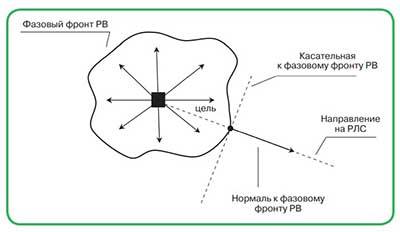
Рис. 2.8. Определение направления на цель по фазовому фронту отраженной радиоволны
Поскольку цель, как правило, находится далеко от РЛС, то ее можно представлять в виде точки. В этом случае говорят, что цель является точечной. Тогда фазовый фронт РВ, отраженный от точечной цели (ТЦ), в картинной плоскости в каждый момент времени можно представить в виде окружности, центр которой располагается в точке нахождения ТЦ (рис. 2.9).
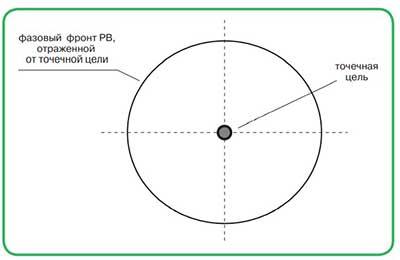
Рис. 2.9. Графическое представление фазового фронта радиоволны, отраженной от точечной цели
При этом направление луча ≪РЛС — цель≫ будет определяться по перпендикуляру (нормали) к фазовому фронту РВ, восстановленному в точке пересечения линии ≪РЛС — цель≫ и окружности вокруг ТЦ (рис. 2.10).
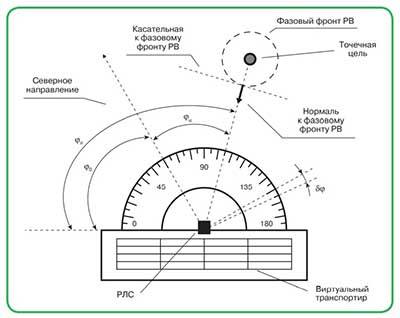
Рис. 2.10. Графическая иллюстрация процесса измерения угловой координаты точечной цели с помощью виртуального транспортира
Если теперь совместить выбранное за начало отсчета значение (не обязательно нулевое) шкалы воображаемого транспортира с направлением на север, то значение его шкалы, совпадающее с лучом ≪РЛС — цель≫, будет соответствовать угловому положению цели относительно направления отсчета. При этом точность определения углового положения цели будет зависеть от цены деления δγ шкалы транспортира (рис. 2.6). Аналогом величины δγ при использовании в качестве измерителя РЛС будет являться ее показатель, именуемый разрешающей способностью δφ по угловой координате. Данный показатель δφ определяется минимальной величиной разности Δ&phi:мин = φ2 − φ1 в угловых направлениях на две близко расположенные цели, при которой сигналы, отраженные или излученные данными объектами, на выходе приемника РЛС отображаются раздельно (рис. 2.11).
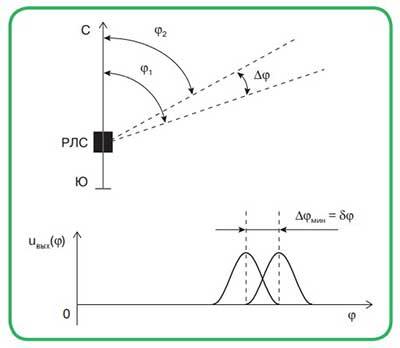
Рис. 2.11. К пояснению понятия «разрешающая способность РЛС по угловой координате»

Рис. 2.6. Представление процесса измерения угловой координаты объекта с помощью виртуального транспортира
Направление, которое выбирается за отсчетное при использовании РЛС, может представлятьсобой, например, направление ≪север — юг≫ (северное направление), направление, соответствующее продольной оси летательного аппарата или транспортного средства и т. п. Все зависит от предназначения РЛС и места ее установки — наземная или бортовая (самолетная, корабельная, космическая и т. п.). Для определенности в дальнейшем в качестве отсчетного будем принимать северное направление. В этом случае угловое положение цели будет соответствовать углу между направлением на север и направлением на цель (рис. 2.7).

Рис. 2.7. Графическая иллюстрация процесса измерения угловой координаты наблюдаемой цели
Для того, чтобы определить направление на цель, необходимо определить направление нормали (перпендикуляра) к фазовому фронту радиоволны, отраженной от цели или излученной ею. При этом под фазовым фронтом РВ понимают геометрическое место точек, расположенных вокруг цели, которые соответствуют постоянному значению фазы РВ при условии, что радиоволна отражается от цели во всех направлениях в пределах 360 градусов (рис. 2.8).

Рис. 2.8. Определение направления на цель по фазовому фронту отраженной радиоволны
Поскольку цель, как правило, находится далеко от РЛС, то ее можно представлять в виде точки. В этом случае говорят, что цель является точечной. Тогда фазовый фронт РВ, отраженный от точечной цели (ТЦ), в картинной плоскости в каждый момент времени можно представить в виде окружности, центр которой располагается в точке нахождения ТЦ (рис. 2.9).

Рис. 2.9. Графическое представление фазового фронта радиоволны, отраженной от точечной цели
При этом направление луча ≪РЛС — цель≫ будет определяться по перпендикуляру (нормали) к фазовому фронту РВ, восстановленному в точке пересечения линии ≪РЛС — цель≫ и окружности вокруг ТЦ (рис. 2.10).

Рис. 2.10. Графическая иллюстрация процесса измерения угловой координаты точечной цели с помощью виртуального транспортира
Если теперь совместить выбранное за начало отсчета значение (не обязательно нулевое) шкалы воображаемого транспортира с направлением на север, то значение его шкалы, совпадающее с лучом ≪РЛС — цель≫, будет соответствовать угловому положению цели относительно направления отсчета. При этом точность определения углового положения цели будет зависеть от цены деления δγ шкалы транспортира (рис. 2.6). Аналогом величины δγ при использовании в качестве измерителя РЛС будет являться ее показатель, именуемый разрешающей способностью δφ по угловой координате. Данный показатель δφ определяется минимальной величиной разности Δ&phi:мин = φ2 − φ1 в угловых направлениях на две близко расположенные цели, при которой сигналы, отраженные или излученные данными объектами, на выходе приемника РЛС отображаются раздельно (рис. 2.11).

Рис. 2.11. К пояснению понятия «разрешающая способность РЛС по угловой координате»
Из сказанного следует, что при измерении углового положения цели необходимо располагать информацией об угловом положении оси &phi0, выбраннойв качестве отсчетной, и луча φл, соответствующего положению нормали к фазовому фронту волны, приходящей от цели. Измерение угловой координаты цели рассмотренным образом, может быть проведено как по фазовому фронту РВ, отраженной от цели, так и по фазовому фронту РВ, излученной самой целью (объектом).
При известных величинах φ0 и φл угловое положение цели φц будет равно
φц = φл - φ0 (2.2)
При значенииφ = 0 получаем φц = φл. Таким образом определяются угловые координаты цели как в горизонтальной плоскости φцг (в плоскости азимута), так и в вертикальной φцв (в плоскости угла места) (рис. 2.10). Располагая информацией о дальности Д до цели и ее угловых координатах φцг, φцв, можно определить местоположение обнаруженной цели в пространстве (рис. 2.12).
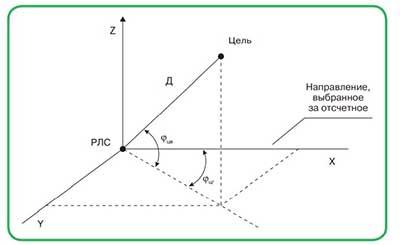
Рис. 2.12. Определение пространственного положения (местоположения) цели

Рис. 2.12. Определение пространственного положения (местоположения) цели
Таким образом, при измерении углового положения цели необходимо располагать информацией об угловом положении оси φ0., выбранной в качестве отсчетной, и луча φл., соответствующего положению нормали к фазовому фронту волны, приходящей от цели.
Знание информации о дальности Д до цели и ее угловых координатах φцг, φцв, позволяет определить местоположение обнаруженной цели в пространстве.
Как отмечалось ранее, процесс обнаружения цели основан на способности радиоволн отражаться от любой области пространства, которая отличается по своим электрическим или магнитным параметрам от среды распространения.
При отражении радиоволн от целей в параметры отраженной волны (радиолокационного сигнала) закладывается информация о свойствах и характеристиках наблюдаемого объекта. Поэтому анализируя параметры отраженной волны, помимо факта обнаружения цели, можно также определять ее координаты и параметры движения, классифицировать наблюдаемые объекты, определять тип цели, габариты и т. п.
Однако необходимо заметить, что отражение РВ от цели будет происходить тогда, когда характерные размеры цели l;ц будут не меньше длины волны λ зондирующего электромагнитного колебания (падающей на цель радиоволны)(рис. 2.13).
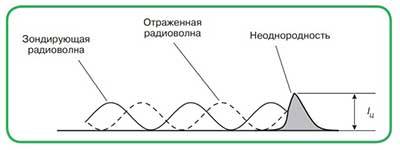
Рис. 2.13. Графическая интерпретация процесса отражения радиоволны

Рис. 2.14. Графическая иллюстрация ситуации, при которой радиоволна не отражается от цели
В противном случае РВ, подобно морской волне (рис. 2.14), будет огибать (омывать) неоднородность, появившуюся на ее пути, и радиосигнал, отраженный от цели, формироваться не будет. Таким образом, для того, чтобы от цели или неоднородности на пути распространения РВ был сформирован отраженный сигнал (отраженная радиоволна), необходимо выполнение следующего условия:

Рис. 2.13. Графическая интерпретация процесса отражения радиоволны

Рис. 2.14. Графическая иллюстрация ситуации, при которой радиоволна не отражается от цели
В противном случае РВ, подобно морской волне (рис. 2.14), будет огибать (омывать) неоднородность, появившуюся на ее пути, и радиосигнал, отраженный от цели, формироваться не будет. Таким образом, для того, чтобы от цели или неоднородности на пути распространения РВ был сформирован отраженный сигнал (отраженная радиоволна), необходимо выполнение следующего условия:
l ц≥ λ (2.3)
Из данного соотношения следует, что возможность цели быть обнаруженной по отраженному от нее сигналу напрямую зависит от длины волны. Учитывая, что наиболее характерные размеры l ц объектов радиолокационного наблюдения составляют единицы—десятки метров, диапазон радиочастот (длин волн) зондирующих колебаний, чаще всего используемый в радиолокации, начинается с единиц метров и ниже.
В то же время, необходимо заметить, что при облучении цели на ее поверхности возникают токи проводимости, если поверхность проводящая, или токи смещения, если поверхность диэлектрическая. Данные токи служат источниками формирования вторичных ЭМК, которые переизлучаются целью во всех направлениях, в том числе, и в направлении на РЛС. Все сказанное относится к любой неоднородности, возникающей на пути распространения радиоволн.
В результате характер отражений от объектов в радиолокации и их интенсивность в значительной степени зависят от соотношения между характерными размерами объекта, существующими неоднородностями на его поверхности и длиной волны.
Таким образом, источником отраженного сигнала являются неоднородности, возникающие на пути распространения радиоволн, электрические или магнитные параметры которых отличаются от среды распространения.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т. д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели (рис. 2.15).
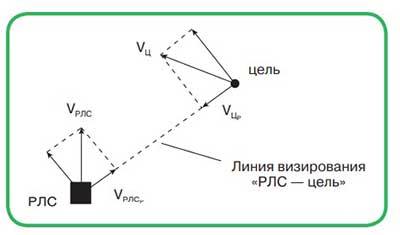
Рис. 2.15. Графическая иллюстрация к определению радиальной скорости движения цели и носителя РЛС
Если в зоне радиолокационного наблюдения находится неподвижная цель, то частота fпрм принимаемого сигнала, отраженного от цели, не меняется по отношению к частоте f0 излученного (зондирующего) сигнала (при условии, что источник излучения неподвижен).

Рис. 2.15. Графическая иллюстрация к определению радиальной скорости движения цели и носителя РЛС
Если в зоне радиолокационного наблюдения находится неподвижная цель, то частота fпрм принимаемого сигнала, отраженного от цели, не меняется по отношению к частоте f0 излученного (зондирующего) сигнала (при условии, что источник излучения неподвижен).
При отражении сигнала от подвижного объекта происходит изменение частоты fпрм по отношению к частоте f0. Характер изменения частоты fпрм принимаемого сигнала в этом случае зависит от направления движения цели по отношению к облучающей ее РЛС. Рассмотрим две ситуации. Первая — точечная цель движется строго навстречу РЛС (рис. 2.16а). В этом случае радиоволна, излучаемая РЛС, встречается с целью раньше на величину Δt = ΔL/Vц по сравнению со случаем неподвижной цели, сокращая, таким образом, период колебания Т0 радиоволны на величину Δt. Здесь ΔL — путь, проходимый целью, с момента излучения РВ до ее встречи с целью, а Vц — скорость движения цели. Поскольку ТЦ движется навстречу РЛС со скоростью Vц << C, то каждый последующий период ЭМК также будет уменьшаться на величину Δt, т. е. период колебаний отраженной волны становится равным Тн1 = Т0 − Δt. А так как период колебания Т0 радиоволны и ее частота f0 связаны соотношением
Т0 = 1/f0,
то получаем, что частота fн1 наблюдаемой волны в точке цели, определяемая как
fн1 = 1/Тн1, (2.4)
будет больше, поскольку период Тн1 меньше, чем Т0.
В случае, когда точечная цель удаляется от РЛС — вторая ситуация (рис. 2.16б), происходит обратная картина. Цель встречается с излучаемой РВпозже на величину Δt по сравнению со случаем неподвижной цели. И, следовательно, период колебаний наблюдаемой радиоволны Тн2 в точке цели увеличивается и становится равным Т0 + Δt. В результате, с учетом выражения (2.4) получаем, что частота fн2 колебаний, наблюдаемых в точке цели, меньше, чем f0, поскольку
Тн2 = Т0 + Δt > Т0.
Тн2 = Т0 + Δt > Т0.

Рис. 2.16. Графическая иллюстрация изменения частоты принимаемых сигналов, отраженных от движущейся и неподвижной целей
Для сравнения на рис. 2.16в и г приведены временные диаграммы изменения частоты сигналов, отраженных от неподвижной цели и целей, двигающихся навстречу (рис. 2.16в) и от РЛС (рис. 2.16г). Как видно, сравнение характера изменения частот данных сигналов позволяет выделить приращение или уменьшение частоты принимаемого сигнала, отраженного от движущейся цели, и, следовательно, определить скорость ее движения.
Таким образом, подводя итог, можно констатировать, что частота fпрм принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты и обозначают как fдп. Величина данного смещения зависит от скорости взаимного движения носителяРЛС и цели.
Необходимо заметить, что рассмотренные свойства РВ будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Уважаемый профессор, Вы рассказали об основных закономерностях распространения радиоволн, которые позволяют проводить радиолокационные измерения и обнаруживать цели. А какие методы измерения координат и параметров движения целей используютв радиолокации?2.2. Методы измерения координат и параметров движения целей Поскольку методы измерения дальности, угловых координат, скорости движения целей отличаются друг от друга, то рассмотрим методы измерения данных величин последовательно друг за другом. Начнем с методов измерения дальности или расстояний. 2.2.1. Методы измерения расстояний Как было отмечено ранее, дальность Д до цели можно определить, если известно время запаздывания tд, принимаемого радиолокационного сигнала. Информация о времени запаздывания tд может быть заложена в любом из параметров принимаемого радиосигнала, а именно: в амплитуде, частоте или в фазе сигнала. При этом параметр, в котором заключена информация о цели, называют информационным. В зависимости от того, какой из информационных параметров радиосигнала используется при определении времени запаздывания tд, различают три метода измерения расстояний: импульсный (амплитудный), частотный и фазовый.
При импульсном методе время запаздывания tд измеряется относительно момента излучения зондирующего импульса по моменту превышения амплитудой отраженного от цели импульсного сигнала некоторого порогового уровня на выходе приемника (ПРМ) РЛС. Фиксация момента превышения порогового уровня может быть выполнена с помощью различных устройств, например, с помощью индикатора на электронно-лучевой трубке (ЭЛТ) с амплитудной отметкой цели (рис. 2.17).
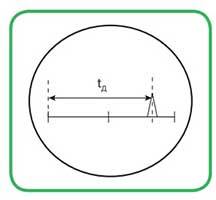
Рис. 2.17. Графическая иллюстрация процесса измерения дальности при использовании в измерителе индикаторного устройства на электронно-лучевой трубке
Однако в современных РЛС данная процедура проводится с помощью цифровых устройств (рис. 2.18).
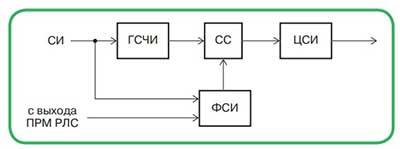
Рис. 2.18. Структурная схема цифрового измерителя дальности до цели
Запуск устройства измерения времени tд в этом случае осуществляется в момент излучения зондирующих импульсов.

Рис. 2.17. Графическая иллюстрация процесса измерения дальности при использовании в измерителе индикаторного устройства на электронно-лучевой трубке
Однако в современных РЛС данная процедура проводится с помощью цифровых устройств (рис. 2.18).

Рис. 2.18. Структурная схема цифрового измерителя дальности до цели
Запуск устройства измерения времени tд в этом случае осуществляется в момент излучения зондирующих импульсов.
Управляет моментами излучения синхронизатор РЛС, который формирует последовательность импульсов, определяющих моменты времени формирования зондирующих импульсов. Данную последовательность импульсов называют ≪синхронизирующими импульсами≫ или просто — ≪синхроимпульсы≫ (СИ) (рис. 2.18).
В момент прихода СИ запускается генератор счетных импульсов (ГСЧИ), который начинает формировать последовательность импульсов с периодом следования
ТСЧ,
причем ТСЧ << TИ = ТСИ, где TИ, ТСИ — периоды следования зондирующих и синхроимпульсов соответственно (см. рис. 2.19).
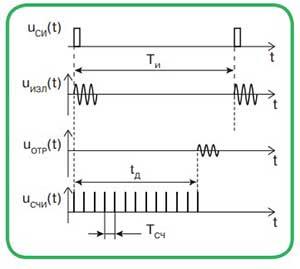
Рис. 2.19. Временные диаграммы, соответствующие процессу измерения дальности импульсным методом при цифровой реализации измерителя
Одновременно с ГСЧИ запускается также формирователь селекторного импульса (ФСИ), который начинает формировать селекторный импульс. В момент начала формирования селекторного импульса открывается схема совпадения (СС), которая обеспечивает прохождение на цифровой счетчик импульсов (ЦСИ) счетных импульсов (СЧИ), поступающих с выхода ГСЧИ. В результате ЦСИ подсчитывает количество СЧИ, поступивших на его вход. Подсчет счетных импульсов продолжается до тех пор, пока не наступит запирание схемы совпадения. Запирание данной схемы происходит в момент окончания селекторного импульса, который наступает при поступлении на вход ФСИ сигнала, отраженного от цели с выхода ПРМ РЛС. Таким образом, на выходе ЦСИ получаем цифровой код, соответствующий времени запаздывания tд сигнала, отраженного от цели. Следовательно, если обозначить через Nд количество СЧИ, поступивших на вход ЦСИ за время tд, то при известной величине периода ТСЧ можно записать
ТСЧ,
причем ТСЧ << TИ = ТСИ, где TИ, ТСИ — периоды следования зондирующих и синхроимпульсов соответственно (см. рис. 2.19).

Рис. 2.19. Временные диаграммы, соответствующие процессу измерения дальности импульсным методом при цифровой реализации измерителя
Одновременно с ГСЧИ запускается также формирователь селекторного импульса (ФСИ), который начинает формировать селекторный импульс. В момент начала формирования селекторного импульса открывается схема совпадения (СС), которая обеспечивает прохождение на цифровой счетчик импульсов (ЦСИ) счетных импульсов (СЧИ), поступающих с выхода ГСЧИ. В результате ЦСИ подсчитывает количество СЧИ, поступивших на его вход. Подсчет счетных импульсов продолжается до тех пор, пока не наступит запирание схемы совпадения. Запирание данной схемы происходит в момент окончания селекторного импульса, который наступает при поступлении на вход ФСИ сигнала, отраженного от цели с выхода ПРМ РЛС. Таким образом, на выходе ЦСИ получаем цифровой код, соответствующий времени запаздывания tд сигнала, отраженного от цели. Следовательно, если обозначить через Nд количество СЧИ, поступивших на вход ЦСИ за время tд, то при известной величине периода ТСЧ можно записать
TД = NД TСЧ
Отсюда дальность Д до цели

т. е. дальность Д до цели пропорциональна количеству счетных импульсов Nд. Необходимо заметить, для того, чтобы измеренное значение дальности соответствовало истинной дальности до цели, т. е. осуществлялся однозначный отсчет данной величины, должно выполняться условие: tДмакс≤TИ, где tд макс — время запаздывания сигнала, отраженного от цели, максимально удаленной от РЛС.
В противном случае РЛС будет измерять время запаздывания tд неод, которое не соответствует истинной величине времени запаздывания tд ист сигнала, отраженного от цели (рис. 2.20).
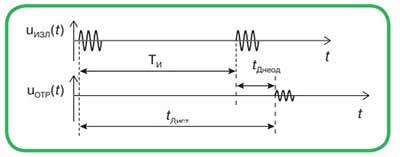
Рис. 2.20. Графическая иллюстрация неоднозначности измерения дальности до цели при импульсном методе ее измерения
Поэтому, выбирая период следования ТИ зондирующих импульсов при заданной максимальной дальности Дмакс, следует исходить из условия

Рис. 2.20. Графическая иллюстрация неоднозначности измерения дальности до цели при импульсном методе ее измерения
Поэтому, выбирая период следования ТИ зондирующих импульсов при заданной максимальной дальности Дмакс, следует исходить из условия

Однако при конструировании РЛС инженеры-разработчики в ряде случаев заведомо нарушают данное условие, учитывая другие аспекты функционирования РЛС, например, связанные с обеспечением максимально возможной дальности действия РЛС или обнаружением целей на фоне отражений от земной поверхности. Но тогда принимаются специальные меры, позволяющие при функционировании РЛС разрешить проблемы, связанные с неоднозначностью измерения дальности.
При частотном методе дальность до цели измеряется по величине изменения частоты излучаемых колебаний за время распространения их от РЛС до наблюдаемой цели и обратно. При этом частота непрерывных частотных колебаний, излучаемых в направлении цели, модулируется (изменяется) по какому-либо периодическому закону. Чаще всего на практике используют три вида частотной модуляции: симметричную линейную, несимметричную линейную и гармоническую (синусоидальную) (рис. 2.21а, б, в).

Рис. 2.21. Характер изменения частоты зондирующего сигнала РЛС при различных видах частотной модуляции
Для определенности будем считать, что частота непрерывных зондирующих колебаний изменяется в соответствии с законом линейной несимметричной модуляции (рис. 2.22), который еще называют также законом ≪несимметричной пилы≫.
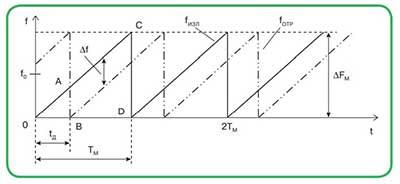 Рис. 2.22. Характер изменения частоты излученного и принимаемого отраженного сигнала от цели при измерении дальности до нее частотным методом
Рис. 2.22. Характер изменения частоты излученного и принимаемого отраженного сигнала от цели при измерении дальности до нее частотным методом
Характерными параметрами данного закона изменения частоты являются: f0 — средняя (центральная) частота изменения; ΔFм — девиация частоты (диапазон изменения частоты от минимального ее значения до максимального); Tм — период частотной модуляции.

Рис. 2.21. Характер изменения частоты зондирующего сигнала РЛС при различных видах частотной модуляции
Для определенности будем считать, что частота непрерывных зондирующих колебаний изменяется в соответствии с законом линейной несимметричной модуляции (рис. 2.22), который еще называют также законом ≪несимметричной пилы≫.
 Рис. 2.22. Характер изменения частоты излученного и принимаемого отраженного сигнала от цели при измерении дальности до нее частотным методом
Рис. 2.22. Характер изменения частоты излученного и принимаемого отраженного сигнала от цели при измерении дальности до нее частотным методом
Характерными параметрами данного закона изменения частоты являются: f0 — средняя (центральная) частота изменения; ΔFм — девиация частоты (диапазон изменения частоты от минимального ее значения до максимального); Tм — период частотной модуляции.
При отражении ЭМК от неподвижной цели частота отраженного сигнала также будет изменяться по закону несимметричной пилы, однако во времени он будет запаздывать на величину tд. Как видно из рис. 2.22, за время запаздывания tд возникает различие между частотами излученного и принятого ЭМК, равное Δf. При известных параметрах ΔFм и Tм закона несимметричной пилы, измеряя величину Δf, можно найти время запаздывания tд (из подобия треугольников ΔОАВ и ΔОСD), а зная его — дальность до цели

Как это видно из (2.5), измеряемая дальность до цели пропорциональна разностной частоте Δf. В то же время из рис. 2.22 видно, что пропорциональность сохраняется до тех пор, пока tд ≤ Tм. Следовательно, для однозначности измерения дальности Д до цели период Tм модуляции частоты зондирующего колебания должен удовлетворять условию
Tм≥t дмакс
Необходимо заметить, что если цель движется, то ее движение вносит ошибку в процесс измерения дальности при использовании частотного метода, которая обусловлена проявлением эффекта Доплера. В этом случае измеренная величина Δfизм не будет соответствовать истинному значению разности частот Δf, соответствующей дальности до цели. В этой связи, первоначально, необходимо измерить доплеровское смещение частоты fдп принимаемого сигнала, а затем проводить измерение дальности до движущейся цели в соответствии с выражением (2.5). Для устранения данного недостатка в РЛС, как правило, используют несимметричный закон частотной модуляции зондирующих колебаний с паузой между восходящими участками (рис. 2.23).
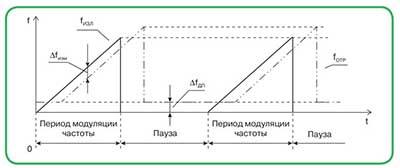
Рис. 2.23. Характер изменения частоты принимаемого отраженного сигнала от цели в процессе измерения дальности при ее движении
Это позволяет в момент паузы определить доплеровское смещение частоты fдп, а затем по известной величине fдп и при наличии частотной модуляции — истинную величину Δf, а следовательно, и дальность до цели.

Рис. 2.23. Характер изменения частоты принимаемого отраженного сигнала от цели в процессе измерения дальности при ее движении
Это позволяет в момент паузы определить доплеровское смещение частоты fдп, а затем по известной величине fдп и при наличии частотной модуляции — истинную величину Δf, а следовательно, и дальность до цели.
При фазовом методе дальность до цели измеряется по разности фаз между излученным uизлt ( ) и принимаемым uпрмt ( ) сигналами.
Представим излученный сигнал в виде
uизлt = Um cos(ω0t + φ0), (2.6)
uизлt = Um cos(ω0t + φ0), (2.6)
где Um — амплитуда сигнала;
(ω0t + φ0) — полная фаза сигнала,
ω0 = 2πf0t — круговая частота сигнала;
φ0 — начальная фаза сигнала.
Сигнал, принимаемый РЛС, будет отличаться от излученного амплитудой и фазой. В этой связи представим принимаемый сигнал в виде
uпрм(t) = aUm cos(ω ( t - tД ) + φ0), (2.7)
где а — коэффициент, учитывающий затухание амплитуды сигнала при распространении РВ,
(ω0 ( t - tД ) + φ0) — полная фаза принимаемого сигнала;
tД — как и ранее, время запаздывания принимаемого сигнала по отношению к излученному.
Сравнивая разность фаз принимаемого и излученного сигналов, получаем

Из данного выражения, с учетом зависимости f0 = С/λ, следует, что дальность до цели равна

В связи с тем, что изменение фазы Δφ однозначно лишь в пределах от 0 до 2 π (рис. 2.24), однозначное измерение дальности Д, как это следует из (2.8), может быть проведено при Д ≤ λ/2.
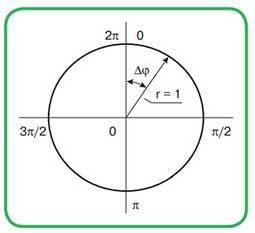
Рис. 2.24. Графическая иллюстрация изменения фазы сигнала, отраженного от точечной цели
И, следовательно, максимальная однозначно измеряемая дальность Дмакс = λ /2. Для увеличения диапазона однозначных измерений дальности до цели целесообразно использовать более длинные волны. При измерении расстояний до целей, которые превышают λ/2, необходимо осуществлять подсчет целого числа периодов изменения фазы за время tд, т. е. Δφ* = Δφ +2 κ Π, κ = 0, 1, 2, ..., что делает сложным само устройство измерения дальности. Другая трудность при использовании фазового метода состоит в том, что в активной радиолокации сложно учесть изменение фазы сигнала, обусловленное удалением (приближением) цели от РЛС, поэтому данный метод используется главным образом в системах с активным ответом, когда работают с ≪прямыми≫ (излучаемыми) сигналами, а не с отраженными.

Рис. 2.24. Графическая иллюстрация изменения фазы сигнала, отраженного от точечной цели
И, следовательно, максимальная однозначно измеряемая дальность Дмакс = λ /2. Для увеличения диапазона однозначных измерений дальности до цели целесообразно использовать более длинные волны. При измерении расстояний до целей, которые превышают λ/2, необходимо осуществлять подсчет целого числа периодов изменения фазы за время tд, т. е. Δφ* = Δφ +2 κ Π, κ = 0, 1, 2, ..., что делает сложным само устройство измерения дальности. Другая трудность при использовании фазового метода состоит в том, что в активной радиолокации сложно учесть изменение фазы сигнала, обусловленное удалением (приближением) цели от РЛС, поэтому данный метод используется главным образом в системах с активным ответом, когда работают с ≪прямыми≫ (излучаемыми) сигналами, а не с отраженными.
Таким образом, при измерении расстояний до цели в радиолокации используются три основных метода измерения дальности до объекта наблюдения — амплитудный (импульсный), частотный и фазовый.
Суть методов измерения дальности основывается на измерении времени запаздывания tД сигнала, отраженного от цели, относительно момента излучения зондирующего сигнала.
При известной величине времени запаздывания tД и постоянной скорости распространения С радиоволн дальность до цели в активной радиолокации оказывается равной половинному произведению величин tД и С.
Информация о времени запаздывания закладывается в такие параметры отраженного сигнала от цели, как амплитуда, частота, фаза. Поэтому наименование метода измерения дальности зависит от того, какой из параметров отраженного сигнала используется для извлечения информации о времени запаздывания, а следовательно, и дальности до цели.